Предмет: Информатика,
автор: Аноним
помогите плиз дам 20 балов
Приложения:
Ответы
Автор ответа:
1
Ответ:
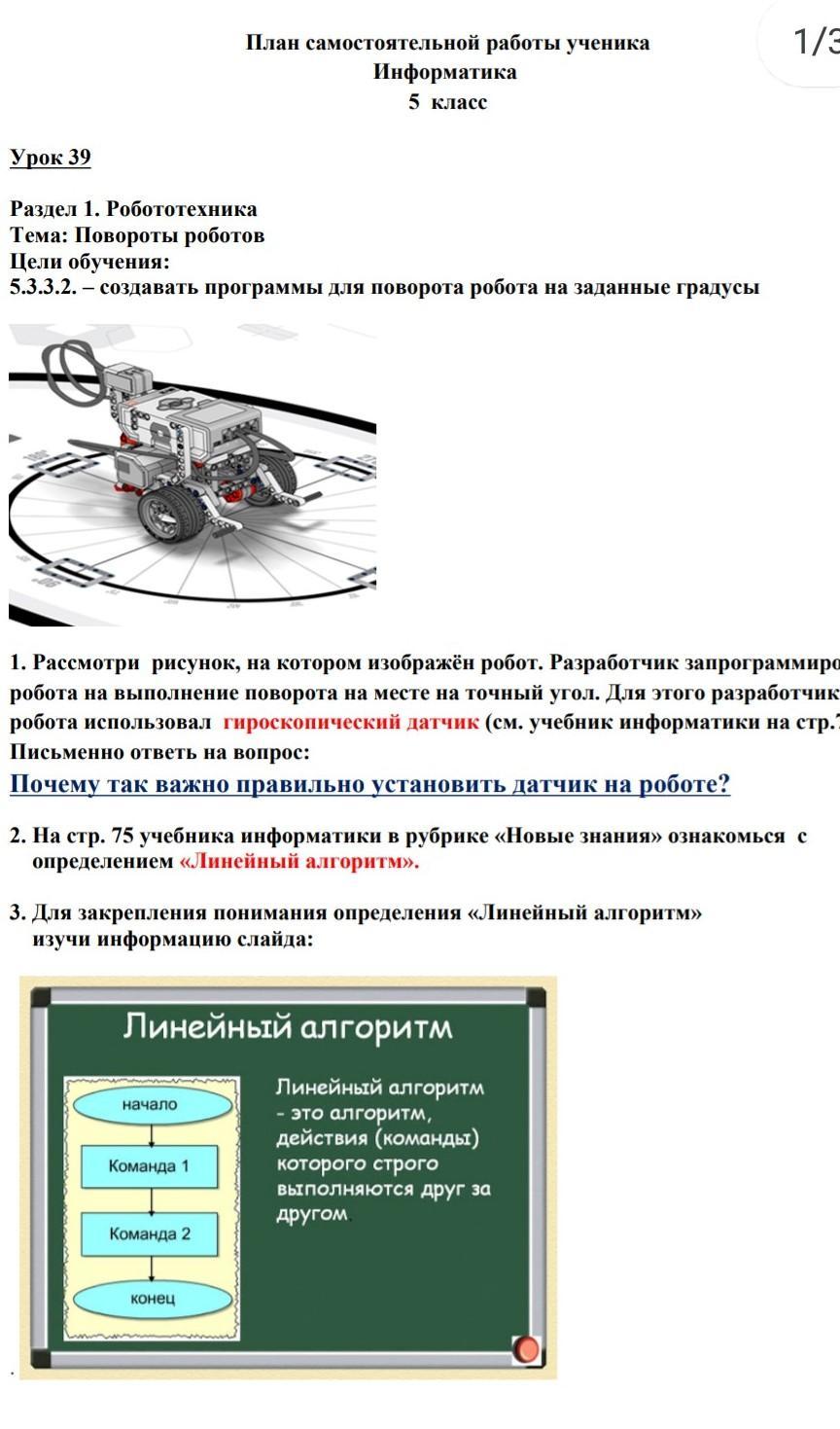
Потому, что положение установленного гиро датчика будет служить точкой отсчёта положения робота в пространстве. Если он изначально стоит криво, то робот будет все расчёты проводить с этими "кривыми" начальными данными. Так же датчик должен быть надёжно закреплён - не болтаться. Иначе это так же внесёт погрешности в расчёты положения робота.
Похожие вопросы
Предмет: Русский язык,
автор: monika771
Предмет: Английский язык,
автор: 16max05
Предмет: Английский язык,
автор: avetik1974
Предмет: Русский язык,
автор: milena269
Предмет: Английский язык,
автор: DanyCatsvil