Предмет: Алгебра,
автор: elizabieber
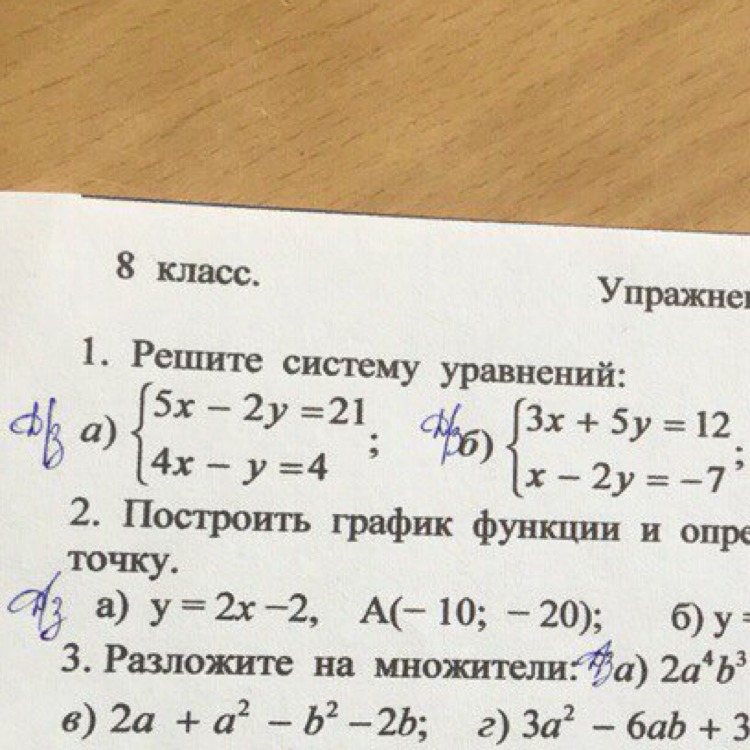
1 задание под а),б) срочно, пожалуйста
Приложения:
Ответы
Автор ответа:
0
Получилось только под б):
б) {3х+5у=12|
{х-2у=-17 | ×3
{3х+5у=12
{3х-6у=-21
1) 11у=33;
у=33÷11;
у=3;
2) 3х+15=12;
3х=12-15;
3х=-3;
х= -3:3;
х=-1;
Ответ: (-1; 3)
б) {3х+5у=12|
{х-2у=-17 | ×3
{3х+5у=12
{3х-6у=-21
1) 11у=33;
у=33÷11;
у=3;
2) 3х+15=12;
3х=12-15;
3х=-3;
х= -3:3;
х=-1;
Ответ: (-1; 3)
Похожие вопросы
Предмет: Английский язык,
автор: smirnovanton717
Предмет: Литература,
автор: olyasamoyluk
Предмет: Геометрия,
автор: loool87
Предмет: Литература,
автор: PoLiNeNoChEk
Предмет: Биология,
автор: Amikamik05